বর্তমানে, বাজারে বেশিরভাগ অ্যাকুয়েটরের দুটি ধরণের বল নিয়ন্ত্রণ পদ্ধতি রয়েছে:
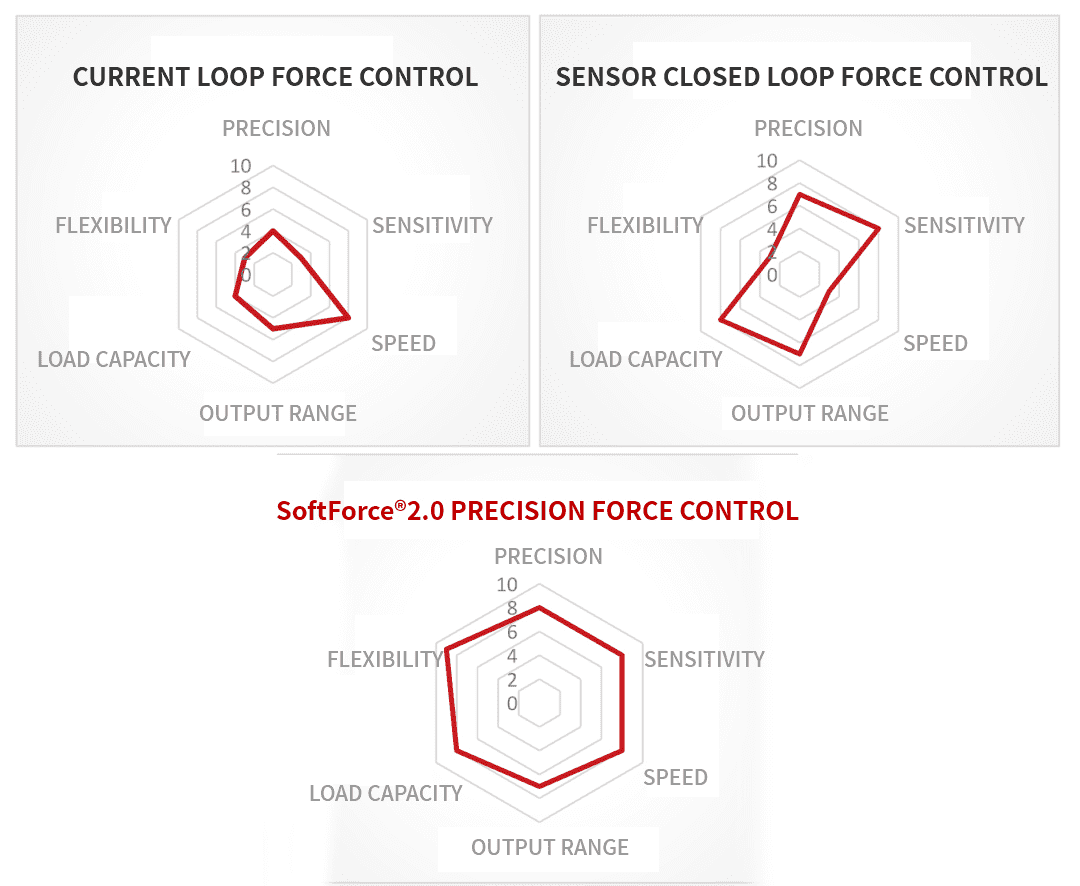
1. বর্তমান লুপ বল নিয়ন্ত্রণ
একটি তুলনামূলকভাবে সহজ প্রচলিত বল নিয়ন্ত্রণ পদ্ধতি, যা মোটরের অভ্যন্তরীণ কারেন্ট সামঞ্জস্য করে বল নিয়ন্ত্রণ উপলব্ধি করে।সুবিধা হল এটি বাস্তবায়ন করা কম কঠিন, এবং এটি 5%-15% নির্ভুলতার সীমার মধ্যে বল নিয়ন্ত্রণ অর্জন করতে পারে;অসুবিধা হ'ল চলাচলের গতি ধীর, এটি বিপরীতভাবে চালিত করা যায় না এবং এটি উচ্চতর নির্ভুলতার প্রয়োজনীয়তার সাথে কিছু পরিস্থিতির চাহিদা পূরণ করতে পারে না।ব্যবহারের সময়কাল পরে, যান্ত্রিক পরিধান ত্রুটি আনবে এবং আরও নির্ভুলতা হ্রাস করবে।
এই ধরনের অ্যাকচুয়েটরগুলিতে সাধারণত সেন্সর থাকে না, এবং সেন্সর থাকলেও, সেগুলি শুধুমাত্র শক্তির "প্রদর্শন" হিসাবে ব্যবহৃত হয় এবং নিয়ন্ত্রণে অংশ নেয় না।উদাহরণস্বরূপ, প্রেসে একটি সেন্সর যুক্ত করা হলে, সেন্সরটি বলের আকার পড়ে এবং মিটারের মাধ্যমে মানটি প্রদর্শন করে, যা বলটির আকারের ম্যানুয়াল সামঞ্জস্য করতে সহায়তা করতে ব্যবহৃত হয়, তবে এই জাতীয় সমন্বয়ের সাধারণত কিছুই করার নেই শক্তির নির্ভুলতার সাথে।

পরিকল্পিত চিত্র, গ্রাফিক্স এবং পাঠ্যের সাথে সম্পর্কিত নয়
2. সেন্সর বন্ধ লুপ বল নিয়ন্ত্রণ
আরেকটি বল নিয়ন্ত্রণ পদ্ধতি হল একটি প্রচলিত বল সেন্সর এবং একটি প্রচলিত ক্লোজড-লুপ কন্ট্রোল অ্যালগরিদম যোগ করা।সুবিধা হল যে নির্ভুলতা উন্নত, কিন্তু অসুবিধা হল যে গতি এখনও ধীর।এইভাবে, বল নিয়ন্ত্রণ নির্ভুলতা 5% থেকে 1% বৃদ্ধি করা যেতে পারে।যদি কোন সঠিক অ্যালগরিদম প্রক্রিয়াকরণ না হয়, বা সেন্সর গতি যথেষ্ট দ্রুত না হয়, এটি "ওভারশুট" প্রবণ।
ফোর্স কন্ট্রোলড অ্যাকচুয়েটর
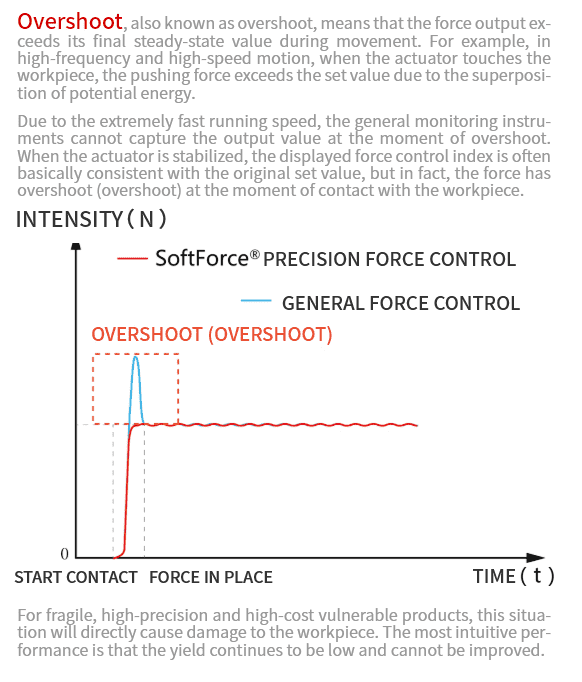
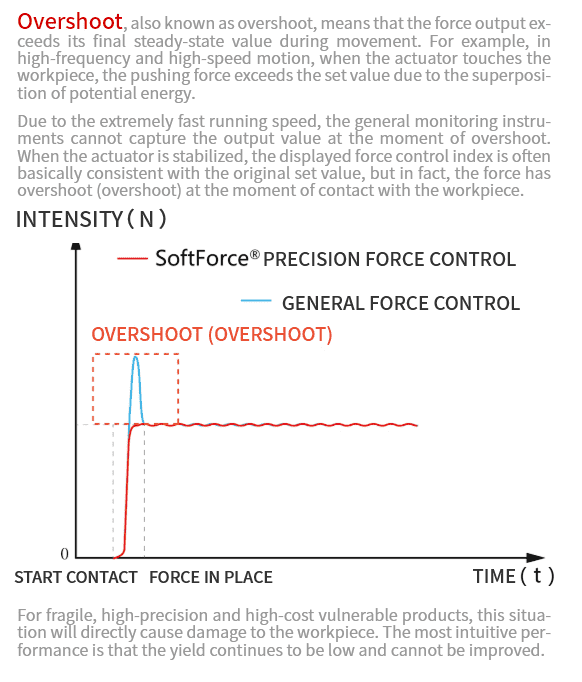
অনিবার্য "ওভারশুট"?
সেন্সরের ক্লোজড-লুপ ফোর্স কন্ট্রোল পদ্ধতি প্রভাব বল মোকাবেলা করা কঠিন।সবচেয়ে প্রত্যক্ষ প্রকাশ হল যে "ওভারশুট" ঘটতে খুব সহজ যখন উচ্চ গতির প্রয়োজনীয়তার সাথে দৃশ্যের সাথে কাজ করে।
উদাহরণ স্বরূপ
সাধারণত, উচ্চ গতির এবং বড় আউটপুটের ক্ষেত্রে, অ্যাকুয়েটর ওয়ার্কপিসের সাথে যোগাযোগ করার মুহূর্তটি প্রায়শই বিশেষত বড় হয়।উদাহরণস্বরূপ, যদি অ্যাকচুয়েটরের পুশিং ফোর্স 10N তে সেট করা থাকে, এটি ওয়ার্কপিসকে স্পর্শ করলে 11N এবং 12N এ পৌঁছানো সহজ হয় এবং তারপরে নিয়ন্ত্রণ অ্যালগরিদমের মাধ্যমে এটিকে 10N-এ ফিরে ডাকা হয়।যখন ফোর্স সেন্সর এবং তথাকথিত ফোর্স-নিয়ন্ত্রিত অ্যাকুয়েটর বাজারে যোগ করা হয় তখন এই ধরনের সমস্যা প্রায়ই ঘটে।
এই সমস্যা যে প্রতিক্রিয়া গতি যথেষ্ট দ্রুত নয়।উচ্চ গতি এবং সুনির্দিষ্ট এবং স্থিতিশীল আউটপুট নিজেদের মধ্যে দ্বন্দ্ব একটি জোড়া.যদি একটি ওভারশুট (ওভারশুট) থাকে, তবে সঠিক বলটি অর্থহীন।
বিশেষ করে প্রেসার অ্যাসেম্বলি, ভঙ্গুর এবং উচ্চ-মূল্যের অংশগুলির নির্ভুল সরঞ্জাম প্রক্রিয়াতে, ওভারশুট সাধারণত অনুমোদিত নয়।
সম্পূর্ণ শক্তি নিয়ন্ত্রণ, উচ্চ ফ্রিকোয়েন্সি এবং ওভারশুট ছাড়া উচ্চ গতি?
কিভাবে TA এটা করে?
উচ্চ-নির্ভুলতা প্রয়োগের পরিস্থিতিগুলির জন্য, উচ্চ গতি এবং উচ্চ নির্ভুলতার প্রয়োজনীয়তাগুলিকে বিবেচনা করার জন্য "নরম অবতরণ" পদ্ধতিটি গ্রহণ করা হয়, অর্থাৎ, বিভাগীয় বল নিয়ন্ত্রণ।অ্যাকচুয়েটর দ্রুত পজিশন মোশন মোডের মাধ্যমে ওয়ার্কপিসের কাছে যায়, দ্রুত সেই অবস্থানে ফোর্স কন্ট্রোল মোডে স্যুইচ করে যেখানে এটি ওয়ার্কপিসের সাথে যোগাযোগ করতে চলেছে এবং ধীরে ধীরে আউটপুট বৃদ্ধি করে যতক্ষণ না এটি প্রিসেট মান পৌঁছায়।পজিশন মোড + ফোর্স কন্ট্রোল মোড + ফোর্স স্ট্যাবিলাইজেশন টাইম, ব্যবহৃত মোট সময় হল অ্যাকচুয়েটরের একক এক্সিকিউশন দক্ষতা।
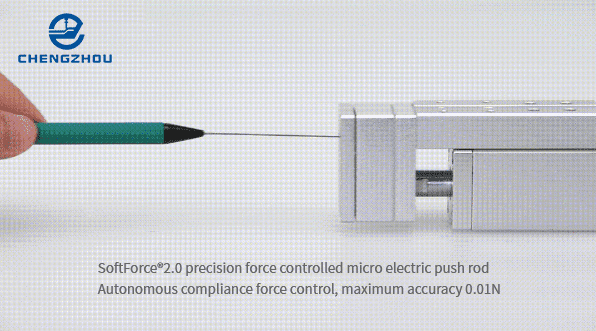
হাই-স্পিড ফোর্স সেন্সর এবং মডেল-ভিত্তিক ভবিষ্যদ্বাণীমূলক নিয়ন্ত্রণ অ্যালগরিদমের সাথে মিলিত, SoftForce®2.0 স্পষ্টতা বল-নিয়ন্ত্রিত অ্যাকচুয়েটর স্বয়ংক্রিয়ভাবে অ্যাকচুয়েটরের অবস্থান এবং ওয়ার্কপিসের সাথে যোগাযোগের অবস্থা সনাক্ত করতে পারে, যাতে অ্যাকুয়েটর, অটোমেশনের শেষ হিসাবে সরঞ্জাম, একটি মানুষের হাত হিসাবে একই ফাংশন আছে.স্পর্শকাতর উপলব্ধি, নিয়ন্ত্রণ এবং সম্পাদন বুদ্ধি।
একই দূরত্বে, "SoftForce ®2.0 প্রিসিশন ফোর্স কন্ট্রোল" এর নরম ল্যান্ডিং স্পিড রেঞ্জ বৃদ্ধি করা হয়েছে, সহনশীলতা আরও বড়, এবং এটি এমনকি পূর্ণ শক্তি নিয়ন্ত্রণ অর্জন করতে পারে, যা সরাসরি উত্পাদন চক্রকে উন্নত করে এবং ট্রায়ালের খরচ অনেক কমিয়ে দেয়। ত্রুটি যাচাই
▋ উন্নত কর্মক্ষমতা অর্জনের জন্য উচ্চ প্রক্রিয়াকরণ ফ্রিকোয়েন্সি
বাজারে সাধারণত ব্যবহৃত "ছয়-অক্ষ শক্তি সেন্সর + রোবট" ফোর্স কন্ট্রোল স্কিমের গণনা চক্র হল 5-10 মিলিসেকেন্ড, অর্থাৎ, প্রক্রিয়াকরণের ফ্রিকোয়েন্সি 100-200 Hz।SoftForce®2.0 যথার্থ বল-নিয়ন্ত্রিত অ্যাকচুয়েটরগুলির প্রক্রিয়াকরণ ফ্রিকোয়েন্সি 4000Hz (অর্থাৎ 0.25 মিলিসেকেন্ড) এ পৌঁছাতে পারে এবং উচ্চ-ফ্রিকোয়েন্সি সিরিজের মডেলগুলি 8000Hz এ পৌঁছাতে পারে, যা সাধারণ রোবট ফোর্স-নিয়ন্ত্রিত অ্যাকুয়েটরগুলির প্রক্রিয়াকরণ ফ্রিকোয়েন্সি 4-8 গুণ।
▋সক্রিয় অনুগত বল নিয়ন্ত্রণ, যা বাহ্যিক শক্তির পরিবর্তন অনুসরণ করতে পারে
দক্ষ প্রতিক্রিয়া হার এবং তাত্ক্ষণিক বল প্রতিক্রিয়া অ্যাকচুয়েটরকে তাৎক্ষণিকভাবে বাহ্যিক শক্তির প্রতি প্রতিক্রিয়া জানাতে এবং সক্রিয় অনুগত বল নিয়ন্ত্রণ অর্জন করতে সক্ষম করে।এমনকি যদি অপারেশন চলাকালীন বাহ্যিক শক্তির সম্মুখীন হয়, তবে এটি সময়মতো সামঞ্জস্য করা যেতে পারে, প্রক্রিয়াটিকে আরও সুনির্দিষ্ট করে তোলে।ওয়ার্কপিসগুলির আরও ভাল সুরক্ষা।
ওভারশুট ছাড়াই উচ্চ ফ্রিকোয়েন্সি এবং উচ্চ গতি
এমনকি উচ্চ-ফ্রিকোয়েন্সি এবং উচ্চ-গতির গতির অধীনেও, এটি এখনও উচ্চ আউটপুট নির্ভুলতা বজায় রাখে এবং একই সাথে "নরম অবতরণ" এবং "কোনও ওভারশুট নয়" নিশ্চিত করে, উচ্চ-গতি, ছোট বল সহ অংশগুলির পৃষ্ঠের সাথে যোগাযোগ করে এবং নমনীয় সঞ্চালন করে সূক্ষ্ম এবং ভঙ্গুর অংশগুলির ক্ষতি এড়াতে অংশগুলি বাছাই এবং বসানো ইত্যাদি।উপাদান.
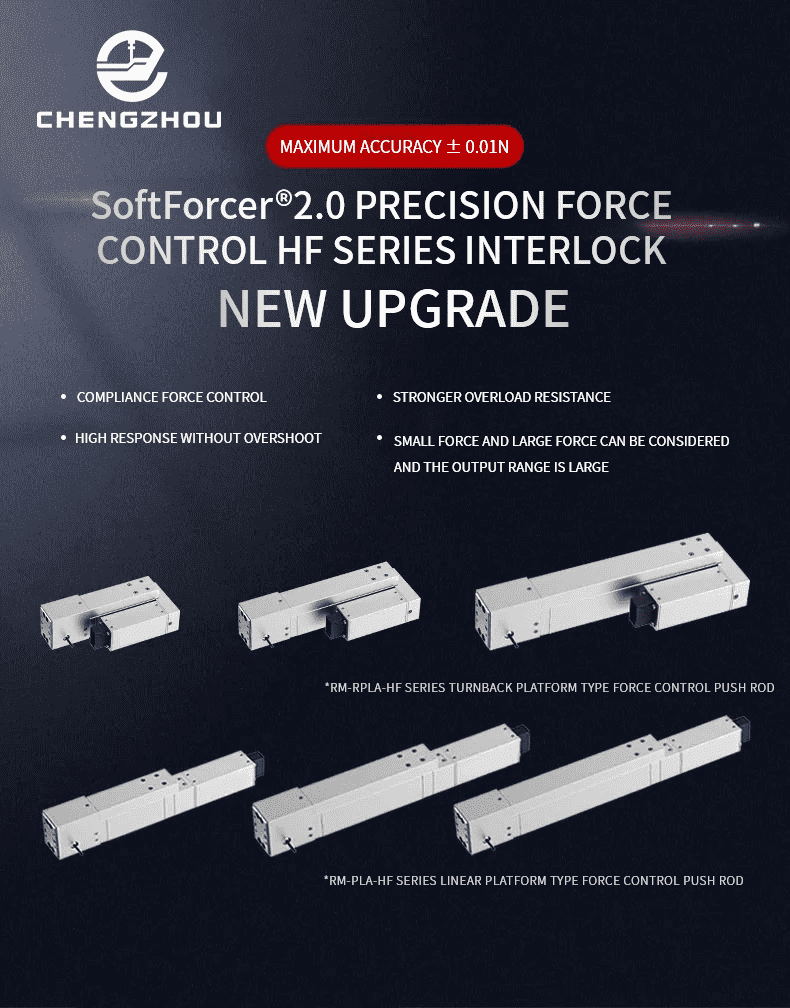
SoftForce®2.0 যথার্থ বল নিয়ন্ত্রণ
এইচএফ সিরিজের নতুন আপগ্রেড
▋ শক্তিশালী অ্যান্টি-ওভারলোড ক্ষমতা
অন-সাইট প্রক্রিয়া এবং একাধিক পুনরাবৃত্তির গভীরভাবে বোঝার উপর ভিত্তি করে, চেংঝো-এর সদ্য আপগ্রেড করা SoftForce®2.0 প্রিসিশন ফোর্স কন্ট্রোল এইচএফ সিরিজের এই বছরের ফেব্রুয়ারিতে একটি সমন্বিত সেন্সর ডিজাইন রয়েছে এবং এর অ্যান্টি-ওভারলোড ক্ষমতা এর চেয়ে কয়েকগুণ বেশি। অতীত, উচ্চ স্থায়িত্ব এবং ব্যবহারের সহজতা সঙ্গে.আরও জটিল পরিস্থিতি মোকাবেলা করুন।
▋ ছোট বল এবং বড় আউটপুট উভয়ই বিবেচনা করতে পারে
SoftForce®2.0 হাই-প্রিসিশন ফোর্স কন্ট্রোল সিস্টেমের সাথে সজ্জিত, স্পষ্টতা বল-নিয়ন্ত্রিত স্লাইড টেবিল এবং বড় স্ট্রোক এবং বড় লোড সহ পুশ রড উচ্চ লোডের অধীনে ছোট এবং সুনির্দিষ্ট বল তৈরি করতে পারে এবং একই সাথে বলটিকেও বিবেচনা করতে পারে। সময়, এবং আউটপুট পরিসীমা বিস্তৃত।বৃহত্তর, অর্থাৎ একটি বিস্তৃত বল গতিশীল পরিসর*।
*ফোর্স ডাইনামিক রেঞ্জ: সর্বোচ্চ এবং সর্বনিম্ন বলের মধ্যে অনুপাত যা আউটপুট হতে পারে।
স্পষ্টতা বল নিয়ন্ত্রণ শুধুমাত্র একটি একক অক্ষে ব্যবহার করা যেতে পারে
SoftForce®2.0 স্পষ্টতা বল-নিয়ন্ত্রিত অ্যাকুয়েটরগুলি শুধুমাত্র একটি একক অক্ষে ব্যবহার করা যায় না, তবে বহু-অক্ষ সমাবেশ সমাধানের জন্য আরও সম্ভাবনা প্রদান করে।উদাহরণস্বরূপ, চেংঝো প্রযুক্তি দ্বারা চালু করা সর্বশেষ "RM Chengzhou 2D সিঙ্ক্রোনাস প্রিসিশন ফোর্স কন্ট্রোল প্ল্যাটফর্ম কন্ট্রোল সিস্টেম" দুটি চেংঝো প্রিসিশন ফোর্স-নিয়ন্ত্রিত বৈদ্যুতিক অ্যাকুয়েটর দ্বারা গঠিত, যা "ছয়-অক্ষ সেন্সর + রোবট" কন্ট্রোল স্কিমের বল প্রতিস্থাপন করতে পারে, মোবাইল ফোনের অভ্যন্তরীণ ফ্রেমের নির্ভুলতা গ্রাইন্ডিং এবং ডিবারিং ইত্যাদির জন্য ব্যবহৃত হয়।
চেংঝো 2D সিঙ্ক্রোনাস নির্ভুলতা বল নিয়ন্ত্রণ প্ল্যাটফর্ম নিয়ন্ত্রণ ব্যবস্থা
(SoftForce®2.0 উচ্চ-নির্ভুল বল নিয়ন্ত্রণ সিস্টেম দিয়ে সজ্জিত)
পরিশীলিত এবং সহজে ব্যবহারযোগ্য পেশাদার পরিষেবা
উন্নত নিয়ন্ত্রণ অ্যালগরিদম এবং সাধারণ ডিবাগিং প্রক্রিয়া গ্রাহকদের জন্য সুবিধাজনক ব্যবহারকারীর অভিজ্ঞতা নিয়ে আসে।এমনকি একটি নিম্ন-স্তরের ব্যাকগ্রাউন্ড সহ একটি অপারেটরও 5 মিনিটের মধ্যে শুরু করতে পারে, সত্যিকারের "প্লাগ অ্যান্ড প্লে"৷
একই সময়ে, Chengzhou প্রযুক্তির পেশাদার এবং শক্তিশালী বিক্রয়োত্তর প্রযুক্তিগত পরিষেবা দল গ্রাহকদের প্রথমবারের মতো সময়মত, ব্যাপক এবং উদ্বেগমুক্ত প্রযুক্তিগত সহায়তা প্রদান করতে পারে, তা প্রযুক্তিগত সন্দেহ, শিক্ষাদান, সমস্যা সমাধান বা রক্ষণাবেক্ষণ হোক না কেন।
চেংঝো প্রযুক্তি সবসময়ই তার সীমানা প্রসারিত করতে যথেষ্ট সাহসী।এর দৃঢ় এবং উদ্ভাবনী প্রযুক্তিগত শক্তির সাথে, এটি সেমিকন্ডাক্টর প্যাকেজিং এবং পরীক্ষা, 3C অটোমেশন, নির্ভুলতা উত্পাদন, স্মার্ট মেডিকেল এবং অন্যান্য শিল্পের জন্য উন্নত পণ্য সরবরাহ করার জন্য ক্রমাগত আরও বুদ্ধিমান, আরও সুনির্দিষ্ট এবং আরও সামঞ্জস্যপূর্ণ উচ্চ-মানের অ্যাকচুয়েটর পণ্য চালু করেছে।মূল উপাদান যেমন নির্ভুল গতি নিয়ন্ত্রণ ব্যবস্থা এবং অ্যাকুয়েটর।
পোস্টের সময়: মে-31-2022